FIRST® Games
2024 – CRESCENDOsm
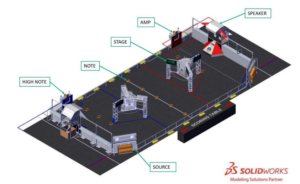
In CRESCENDOSM presented by Haas, two competing alliances are invited to score notes, amplify their speaker,
harmonize onstage and take the spotlight before time runs out. Alliances earn additional rewards for meeting
specific scoring thresholds and for cooperating with their opponents.
During the first 15 seconds of the match, robots are autonomous. Without guidance from their drivers, robots
leave their starting zone, score notes in their speaker or amp, and collect and score additional notes.
During the remaining 2 minutes and 15 seconds, drivers control their robots. Robots collect notes from human
players at their source and score them in their amp and speaker. Each time an alliance gets 2 notes in their
amp, the human player can amplify their speaker for 10 seconds. Notes scored in an amplified speaker are
worth more points than those scored in an unamplified speaker.
A human player may choose to repurpose a note scored in their amp in cooperation with their opponent. If
each alliance repurposes a note by hitting their Coopertition button in the first 45 seconds of teleop, all teams
in the match receive a Coopertition point (which influences their rank in the tournament), and the number of
notes needed for the melody bonus is reduced.
As time runs out, robots race to get onstage and deliver notes to their traps. Harmonizing robots, i.e. robots
sharing a chain, earn an added bonus. Robots earn even more points if a human player spotlights robots on a
chain by scoring a note on the chain’s microphone.
The alliance that earns the most points wins the match!
2023 – CHARGED UPSM
In CHARGED UPSM presented by Haas, two competing alliances are invited to process game pieces to bring energy to their community. Each alliance brings energy to their community by retrieving their game pieces from substations and scoring it into the grid. Human players provide the game pieces to the robots from the substations. In the final moments of each match, alliance robots race to dock or engage with their charge station!
Each match begins with a 15-second autonomous period, during which time alliance robots operate only on pre-programmed instructions to score points by:
- leaving their community
- retrieving and scoring game pieces onto the grid,
- docking on or engaging with their charge station.
In the final 2 minutes and 15 seconds of the match, drivers take control of the robots and score points by:
- continuing to retrieve and score their game pieces onto the grid and
- docking on or engaging with their charge station.
The alliance with the highest score at the end of the match wins!

2022 – RAPID REACTSM
In RAPID REACTSM presented by The Boeing Company, two competing alliances are invited to process
cargo for transportation. Each alliance is assigned a cargo color (red or blue, based on alliance affiliation)
to process by retrieving their assigned cargo and scoring it into the hub. Human players assist the cargo
retrieval and scoring efforts from within their terminals. In the final moments of each match, alliance
robots race to engage with their hangar to prepare for transport!
Each match begins with a 15-second autonomous period, during which time alliance robots operate only on pre-programmed instructions to score points by:
- taxiing from their tarmac and
- retrieving and scoring their assigned cargo into the hub.
In the final 2 minutes and 15 seconds of the match, drivers take control of the robots and score points by:
- continuing to retrieve and score their assigned cargo into the hub and
- engaging with their hangar.
The alliance with the highest score at the end of the match wins!

2021 – INFINITE RECHARGE at Home
In INFINITE RECHARGE at Home the season was played remotely due to COVID restrictions. The awards were modified in order to accommodate the lack of actual face to face competition. The competition was broken up into 3 parts:
Skills Competition: INFINITE RECHARGE at Home includes a Skills Competition consisting of five (5) challenges, inspired by INFINITE RECHARGE. Teams may opt to compete in as many or as few of the challenges as they would like. Teams should try to complete at least three (3) of the challenges, as each team is awarded points towards their Overall Score for the three (3) challenges they performed the best in.
The 5 challenges were:
1) Galactic Search Challenge – In the Galactic Search challenge, teams emulate the Autonomous Period of INFINITE RECHARGE
gameplay by locating and collecting POWER CELLS as fast as they can on one of two (2) pairs of paths.
2) AutoNav Challenge – In the AutoNav Challenge teams program their ROBOTS to autonomously drive predetermined routes
through three (3) different paths as fast as possible.
3) Hyperdrive Challenge – In the Hyperdrive Challenge teams drive their ROBOTS remotely, without the assistance of preprogrammed navigation, through four (4) different paths as fast as possible. The first three (3) paths are
the same as those described in Section 2.4.7 AutoNav Challenge, the fourth path is the Lightspeed
Circuit path.
4) – Interstellar Accuracy Challenge – In the Interstellar Accuracy Challenge teams emulate the shooting challenges of INFINITE RECHARGE gameplay by scoring POWER CELLS into a representation of the BOTTOM PORT, OUTER PORT, AND
INNER PORT from four (4) zones. Teams attempt to score as many points as possible with their ROBOT
(which is either autonomous and/or remotely controlled) in five (5) minutes.
5) – POWER PORT Challenge – In the POWER PORT Challenge, teams emulate the teleoperated portion of INFINITE RECHARGE
gameplay by collecting POWER CELLS with their ROBOT (which is either autonomous and/or remotely
controlled) and scoring them into a representation of the POWER PORT. Teams attempt to score as
many points as possible in the POWER PORT in one minute.
Game Design Challenge: The Game Design Challenge is an opportunity for teams to design a FIRST Robotics Competition game
and compete against other teams for a chance to pitch their game to the FIRST Robotics Competition Game Design Team. Teams may include a specified Game Design Challenge ELEMENT (see Section 3.3.1 Game Design Challenge ELEMENT for more details) that was included in each Kickoff Kit. In addition to developing a game, each team that participates in the Game Design Challenge answers specific questions in their submission to be considered for awards and possible advancement. Teams may also include supplementary information with their submission and have the opportunity to elaborate on their game during an interview with FIRST Robotics Competition judges. Teams are expected to develop as complete a game as possible, at the same time creating a succinct presentation for judges to evaluate. Finalist game(s), or their elements, may inspire or be used as a future official FIRST Robotics Competition game! Although FIRST is likely to make modifications to any submitted concept, credit will be given to the associated team when the game/element is released.
FIRST® Innovation Challenge presented by Qualcomm: In the FIRST® Innovation Challenge presented by Qualcomm, registered teams identify a real-world problem related to this season’s theme FIRST® GAME CHANGERSSM, powered by Star Wars: Force for
Change, design a solution, build a business model, and deliver a pitch to compete with other FIRST Robotics Competition teams for judged awards and a chance to be one (1) of twenty (20) Finalist teams invited to the FIRST Global Innovation Awards powered by Star Wars: Force for Change, a multi-day experience where students showcase their innovations, participate in workshops, and receive mentorship from experts. Science, technology, engineering, and math (STEM) have always been the catalyst for innovation that moves our world forward. As our societies continue to evolve and become more inclusive and connected, our sports – and the activities that make us physically and mentally strong – must change along with us. This means redefining where and how we move and play. We actively play and move for ourselves, but also with and as a community to attain optimum health. This means inventing and innovating places, ways, sports, tools, and concepts so people of all abilities and skill levels can thrive through active play and movement.
2020 – Infinite Recharge
In INFINITE RECHARGESM, two alliances work to protect FIRST® City from approaching asteroids caused by a distant space skirmish. Each Alliance, along with their trusty droids, race to collect and score Power
Cells in order to energize their Shield Generator for maximum protection. To activate stages of the Shield Generator, droids manipulate their Control Panels after scoring a specific number of Power Cells. Near
the end of the match, droids race to their Rendezvous Point to get their Shield Generator operational in order to protect the city!
During the 15 second Autonomous Period, droids follow pre-programmed instructions. Alliances score points by:
1. Scoring Power Cells in the Power Port
2. Moving from the Initiation Line
In the final 2 minutes and 15 seconds of the match, drivers take control of the droids. Alliances score points by:
1. Continue to score Power Cells in the Power Port
2. Completing Rotation Control
3. Completing Position Control
4. Hanging from the Generator Switch
5. Getting the Generator Switch to the level position
The Alliance with the highest score at the end of the Match wins

2019 – DESTINATION: DEEP SPACE
In DESTINATION: DEEP SPACE, Presented by The Boeing Company, we join two competing alliances collecting samples on planet
Primus. Unpredictable terrain and weather patterns make remote robot operation essential to their mission on the planet. With only 2:30 until
liftoff, the alliances must gather as many cargo pods as possible and prepare their spaceships before the next sandstorm arrives.
2:30: A sandstorm limits driver visibility so robots independently follow pre-programmed instructions or are operated by human drivers via video from their habitat. Alliances score points by:
1. Deploying robots from habitat
2. Preparing rockets and cargo ship with hatch panels
3. Loading cargo pods into their rockets and cargo ship
2:15: The sandstorm clears and human operators take control of their robots. Alliances continue to score points by:
1. Preparing rockets and cargo ship with hatch panels
2. Loading more cargo pods
3. Returning the robot safely to the alliance’s habitat
0:00: Rocket liftoff The alliance with the highest score at the end of the match wins.
2018 – POWER UPSM
FIRST POWERUP is played by two alliances of three robots each. Each match is 2 minutes and 30 seconds long. Robots operate using pre-programmed instructions for the first 15 seconds of each match and then drivers control the robots for the remainder of the match.
During AUTO, alliances score points by reaching their own autonomous line and gaining ownership of the scale or their switch. Each three-robot alliance has three ways to help defeat the boss during TELEOP: owning the scale or their switch, playing power-ups, and climbing the scale on a rung. Ownership occurs when the scale or alliance’s switch is tipped in their favor. Robots collect and deliver power cubes to gain ownership. Alliances can exchange power cubes for power-ups. Power-ups provide a timed advantage during the match. There are three power-ups that can be played: FORCE, BOOST, and LEVITATE.

2017 – STEAMWORKS
FIRST STEAMWORKS is played by two alliances of three robots each on a 27 ft. by 54 ft. 4 in. field. Each match is 2 minutes and 30 seconds long. Robots operate using pre-programmed instructions for the first 15 seconds of each match and then drivers control the robots for the remainder of the match.
The objective of FIRST STEAMWORKS is for robots to work together to gain points by scoring green balls, or “fuel,” into the low or high goals of a boiler, or by retrieving and delivering gears to the “airship” in the middle of the field. The human players on the airship will collect and install the gears. If enough, the gears are installed and will be used to turn the rotors and award the alliance extra points. During t he last 30 seconds of the match, ropes are deployed from the airships, and robots can climb up the ropes to score even more points. The alliance with the highest score wins the match!
2016 – STRONGHOLD
FIRST STRONGHOLD is a medieval tower defender game in hich two alliances of three teams each select defenses to fortify their outer works before competing simultaneously to score points while breaching the opponent’s outer works and capturing the opponent towers.
Each match is two minutes and thirty seconds long. The Autonomous Period (AUTO) is the first fifteen seconds of the match in which robots operate without any drive control or input. The Teleoperated Period (TELEOP) is the remaining two minutes and fifteen seconds of a match in which robots may be directly controlled by driver and/or human players.
During AUTO, points are earned by robots that reach or cross a defense and score boulders in goals. During TELEOP, points are earned by robots crossing undamaged defense, scoring boulders in goals, and challenging or scaling the opponent’s tower.

2015 – RECYCLE RUSHSM
RECYCLE RUSHSM is a recycling-themed game played by two Alliances of three robots each. Robots score points by stacking totes on scoring platforms, capping those stacks with recycling containers, and properly disposing of pool noodles, representing litter. In keeping with the recycling theme of the game, all game pieces used are reusable or recyclable by teams in their home locations or by FIRST at the end of the season.
Each Alliance competes on their respective 26 ft. by 27 ft. side of the playing field. Each match begins with a 15-second Autonomous Period in which robots operate independently of their drivers. During this period, robots attempt to earn points by moving themselves, their yellow totes, and their recycling containers into the area between the scoring platforms, called the Auto Zone.
During the remaining two minutes and 15 seconds of the match, called the Teleop Period, robots are controlled remotely by student drivers located behind the walls at the ends of the field. Teams on an Alliance work together to place as many totes on their white scoring platforms as possible. Alliances earn additional points for recycling containers placed on the scored totes, with containers at greater height earning more points.
Alliances also earn points for disposing of their litter in their Landfill Zone near the center of the field, or placing litter in or on scored recycling containers. Alliances that leave litter unprocessed on their side of the field at the end of the match, not in scoring position, will add points to the score of the other Alliance.
Alliances have an opportunity to earn Coopertition® points by coordinating with the other Alliance in the match. Coopertition points are awarded if, at some point in the match, there are at least four yellow totes on the step simultaneously. Coopertition points are doubled if the Alliances arrange at least four of those yellow totes in a single stack on the step.

2014 – AERIAL ASSISTSM
AERIAL ASSISTSM is played by two competing Alliances of three robots each on a flat 25’ x 54’ foot field, straddled by a truss suspended just over five feet above the floor. The objective is to score as many balls in goals as possible during a two (2)-minute and 30-second match. The more Alliances score their ball in their goals, and the more they work together to do it, the more points their Alliance receives.
The match begins with one 10-second Autonomous Period in which robots operate independently of driver. Each robot may begin with a ball and attempt to score it in a goal. Alliances earn bonus points for scoring balls in this mode and for any of their robots that move in to their zones. Additionally, each high/low pair of goals will be designated “hot” for five seconds, but the order of which side is first is randomized. For each ball scored in a “hot” goal, the Alliance earns additional bonus points.
For the rest of the match, drivers remotely control robots from behind a protective wall. Once all balls in autonomous are scored, only one ball is re-entered in to play, and the Alliances must cycle a single ball as many times as possible for the remainder of the match. With the single ball, they try to maximize their points earned by throwing balls over the truss, catching balls launched over the truss, and scoring in the high and low goals on the far side of the field.
Alliances receive large bonuses for “assists,” which are earned for each robot that has possession of the ball in a zone as the ball moves down the field. Points are awarded for each action per the table below.

2013 – ULTIMATE ASCENTSM
ULTIMATE ASCENTSM is played by two competing alliances on a flat, 27 x 54 foot field. Each Alliance consists of three robots, and they compete to score as many discs into their goals as they can during a two (2)-minute and fifteen (15)-second match. The higher the goal in which the disc is scored, the more points the Alliance receives.
The match begins with a fifteen (15)-second Autonomous Period in which robots operate independently of driver inputs. Discs scored during this period are worth additional points. For the remainder of the match, drivers control robots and try to maximize their alliance score by scoring as many goals as possible.
The match ends with robots attempting to climb up pyramids located near the middle of the field. Each robot earns points based on how high it climbs. Scoring for the match is summarized below.

2012 – Rebound RumbleSM
Rebound RumbleSM is played by two competing alliances, each consisting of three robots. They compete to score as many basketballs into their hoops as they can during a 2 minute and 15 second match. The hoops are at three different llevels. The highest level basket gains a score of 3 points; the middle level baskets score 2 points; and the lower level basket is a score of 1 point.
The match begins with a 15-second Hybrid Period in which robots operate independently of driver inputs. During this Hybrid Period, one robot on each Alliance may be controlled using a Microsoft Kinect. Baskets scored during this period are worth extra points. For the remainder of the match, drivers control robots and try to score as many baskets as possible.
The match ends with robots attempting to balance on bridges located at the middle of the field. In Qualification Matches, a robot from each Alliance will also try to balance on the white Coopertitition™ bridge to score additional ranking points for each Alliance.

2011 – LOGO MOTION™
The Celebration of 20 Years of FIRST®
LOGO MOTIONTM is played by two competing alliances, each consisting of three robots. They compete to hang as many inflated plastic shapes (triangles, circles, and squares) on their grids as they can during a 2 minute and 15 second match. The higher the teams hang their game pieces on their scoring gird, the more points their alliance receives.
The match begins with one 15-second Autonomous Period in which robots operate independently of driver inputs and must hang Ubertubes to score extra points. For the rest of the match, drivers control robots and try to maximize their alliance score by hanging as many logo pieces as possible. Any logo piece hung on the same peg as an Ubertube receives double points. If teams assemble the logo pieces on their scoring grids to form the FIRST logo (triangle, circle, square, in a horizontal row in that order), the points for the entire row are doubled.
The match ends with robots deploying minibots, small electro-mechanical assemblies that are independent of the host robot, onto vertical poles. The minibots race to the top of the pole to trigger a sensor and earn additional bonus points.
![]()
2010 – Breakaway™
This game is roughly based off of soccer. Two alliances (red and blue) made up of three robots each compete in each match. The field is divided into three sections by 13.5″ tall bumps with 18″ high tunnels that divide each bump. Each alliance score points by shooting balls into their goals.
The match starts with a 15-second Autonomous Period in which robots use pre-programmed code to score balls into the 4 goals. After the Autonomous Period finishes, the 2-minute teleoperated period begins. Human drivers take control of their robots and try to score balls, defend goals, and keep balls on their alliance’s side of the field.
In the final 20 seconds of the match, alliances can score bonus points by lifting their robots above the platform of their alliance’s tower (20″) for 2 points. If a robot from the same alliance lifts itself from a currently elevated robot until it is above the platform of the tower, it is considered elevated, and gains that alliance 3 additional points.
2009 – Lunacy™
The game is supposed to simulate driving on the Moon, celebrating the 40th anniversary of Man landing on the Moon. The floor is covered in a slick material called “Regolith” and all robots are required to use “Rover Wheels” to simulate the 1/6 gravity on the Moon.
Each robot has a “trailer” hitched to the back of it. Points are scored by robots shooting orbit balls into the opposing alliance robots’ trailers. Each orbit ball is worth 2 points. A moon rock is worth 2pts, an empty cell is worth 2pts, and a super cell is worth 15pts.
The match starts off with a 15-second Autonomous Period in which robots can track pink and green markers on top of another robot’s trailer. Once the 2-minute Teleoperated Period begins, drivers can take control of their robots and continue to score. Human players can also score orbit balls, and are also the only ones allowed to score two possible super cells, which are worth 15 points each. Human players stationed at Outposts also have the ability to throw empty cells into play, which can be exchanged for super cells at fueling ports.

2008 – FIRST® Overdrive
Robots are designed to race around a track with 40″ inflated Trackballs, passing them either over or under a 6′ 6″ overpass. Extra points are scored by robots positioning the Trackballs on the overpass before the end of the 2 minute and 15 second match. There is also a 15-second Hybrid Mode in which autonomous programmed routines can be commanded by a human player.

2007 – Rack N’ Roll
Two alliances consisting of three robots each compete by hanging inflated tubes on pegs configured in round rows and columns on a 10-foot high center “rack” structure. Points are scored when rows and columns of the same color tubes are hung. A row or column of n tubes is worth 2n points to a maximum of n=8.
The first 15-seconds of the match is the Autonomous Period in which robots can place Keeper tubes on the rack. Once the Autonomous Period is complete, any Keeper tubes not already on the rack are no longer valid for scoring.
The 2-minute Teleoperated Period is when human drivers control the robot to continue to hang tubes and score points for their alliance.
The final 15 seconds of the game, the End Game, alliances can score bonus points by lifting each other’s robots. If they lift the robots more than 4″ off the floor, they will score 15 bonus points. If they lift the robots higher than 12″ off the floor, they will score 30 bonus points.

2006 – Aim High
Two alliances, red and blue, each consisting of three robots compete against each other. During a 10-second Autonomous Mode, robots are programmed to score into any of the three goals, one raised center goal marked by a green vision target and tow corner goals at the floor level. At the end of the Autonomous Period, the alliance with the most points will gain a 10-point bonus.
During the Teleoperated Period, human drivers control their robots to score as many balls as they can during the 2-minute period.
At the end of the match, alliances can receive bonus points by placing its three robots on a platform below the center goal.
Scoring is as follows: 3 points for any ball scored in the center goal, 1 point for any ball scored in the corner goals, 10 bonus points for scoring the highest in Autonomous Mode, and 25 points for placing all 3 robots on the platform at the end (10 points for 2 robots and 5 points for 1 robot on the platform).
2005 – Triple Play
Two alliances consisting of 3 robots each played on a 27′ wide by 52′ long playing field with the 9 goals configured in 3 x 3 matrix, similar to tic-tac-toe. The robots will attempt to place the red and blue game tetras in or on one or more of the nine goals to score points and “claim ownership” of the goals.
Tetras scored on the top of a goal are worth 3 points. Tetras contained insides the goals are worth 1 point. A goal was “owned” by the alliance whose color tetra was highest on or inside the goal. Rows of three owned goals garnered the alliance an additional 10 points per at the end of the match. Ten points could also be scored in all three robots in the same alliance were behind the alliance line at the end of the match.
