2024: Cacaphony

game: CrescendoSM
In CRESCENDO,SM presented by Haas, two competing alliances are invited to score notes, amplify their speaker,
harmonize onstage, and take the spotlight before time runs out. Alliances earn additional rewards for meeting
specific scoring thresholds and for cooperating with their opponents.
2023: ThunderVolt

Game: Charged UpSM
In CHARGED UPSM presented by Haas, two competing alliances are invited to process game pieces to
bring energy to their community. Each alliance brings energy to their community by retrieving their game
pieces from substations and scoring it into the grid. Human players provide the game pieces to the
robots from the substations. In the final moments of each match, alliance robots race to dock or engage
with their charge station!
 2023 Drive Team
2023 Drive Team
2022: TURBULANCE

Game: Rapid ReactSM
In RAPID REACTSM presented by The Boeing Company, two competing alliances are invited to process
cargo for transportation. Each alliance is assigned a cargo color (red or blue, based on alliance affiliation)
to process by retrieving their assigned cargo and scoring it into the hub. Human players assist the cargo
retrieval and scoring efforts from within their terminals. In the final moments of each match, alliance
robots race to engage with their hangar to prepare for transport!

2022 Drive team
Elliot W. – Aux Driver
Isaac W – Base Driver
Nicole L – Coach
Ishan – Human Player
2021: DARTH THUNDEROUS THE WISE

Game: Infinite Rechargesm at Home
In INFINITE RECHARGE at Home the season was played remotely due to Covid restrictions. The awards were modified in order to accommodate the lack of actual face to face competition. The competition was broken up into 3 parts: Skills Competition, Game Design Challenge and the FIRST® Innovation Challenge presented by Qualcomm.
2020: DARTH THUNDEROUS THE WISE
Game: Infinite Rechargesm
In INFINITE RECHARGEsm, two alliances work to protect FIRST City from approaching asteroids caused
by a distant space skirmish. Each Alliance, along with their trusty droids, race to collect and score Power
Cells in order to energize their Shield Generator for maximum protection. To activate stages of the Shield
Generator, droids manipulate their Control Panels after scoring a specific number of Power Cells. Near
the end of the match, droids race to their Rendezvous Point to get their Shield Generator operational in
order to protect the city!

2020 Drive Team:
Kyle B – Coach
Isaac W – Base Driver
Joe M – Aux Driver
Chase J- Human Player
2019: JUPITER
Game: Destination Deep Spacesm
In DESTINATION: DEEP SPACEsm Presented by The Boeing Company, we join two competing alliances collecting samples on planet
Primus. Unpredictable terrain and weather patterns make remote robot operation essential to their mission on the planet. With only 2:30 until
liftoff, the alliances must gather as many cargo pods as possible and prepare their spaceships before the next sandstorm arrives.

2019 Drive Team:
Kate M- Coach
Matt M- Base Driver
Matt S- Aux Driver
Kyle B – Human Player
Josh L _ Technician
2018: SUPER CUBE FINDER II TURBO
Game: Powerupsm
Super Cube Finder II Turbo was designed to be the master of the Switch and the Exchange. In this year’s game, power cubes were collected and placed in either the Scale, Switches, or Exchange. Our robot was a small but fast robot that was able to pick up cubes and swiftly put them into the Exchange or the Switches thanks to our pneumatic arm. During driver practice, our drive team of Casey, Matt, Andrew, and Calvin were able to put nine cubes through the Exchange and into the vault in under a minute! During competition we rocked the house, filling the vault with time to spare with the rest of the time spent playing defense or taking over the enemy switch. During end game, robots would have to rise above a 12in mark with most robots utilizing the small rung provided above them. Our design team had something else in mind. We developed 2 ramps which our alliance partners could drive up on and we’d lift the two robots above the mark, gaining 30 points each while our robot climbed using power-ups that we got from filling the vault.
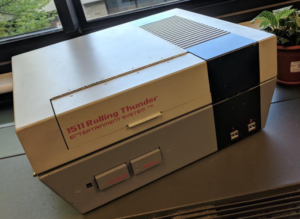 This year’s theme was retro videogames, so our controls team decided to make a driver station inspired by the original Nintendo Entertainment System. With custom decals, usable controller ports, a cartridge door, and LEDs on the inside, this controls system caught the eyes of many! It’s a shame that the original NES controller doesn’t have enough buttons to control our robot.
This year’s theme was retro videogames, so our controls team decided to make a driver station inspired by the original Nintendo Entertainment System. With custom decals, usable controller ports, a cartridge door, and LEDs on the inside, this controls system caught the eyes of many! It’s a shame that the original NES controller doesn’t have enough buttons to control our robot.

2018 Drive Team:
Andrew F – Coach
Casey S – Driver
Matt S – Aux Driver
Calvin M- Human Player
Josh L – Mechanic
2017: THUNDER SHOGUN

Game: SteamWorkssm
This years robot was designed to receive gears from the human player and deliver them to the airship at a rapid rate. It also included ground pick up for fuel and a shooter to deliver the fuel to the boiler. for the end game we had a climber that could ascend the rope in less than 3 seconds.
 2017 Drive Team:
2017 Drive Team:
Austin M – Coach
Casey S – Driver
Andrew F – Aux Driver
Matt S – Pilot
McKenna U- Human Player
A special Mention To Calvin M who stepped into the human player position at the Midwest Regional.
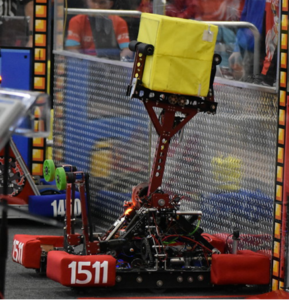
2016: SIR ROLLING OF THUNDER

Game: Strongholdsm
For this years game our robot was designed to be a defense buster. It’s low profile and pneumatic wheels allowed it to defeat most of the defenses. Our boulder intake was designed to quickly acquire and retain a boulder so we could deliver it to the low goal with accuracy. For the end game we designed a square telescoping arm that we could extend and hook on to the Tower Bar and easily lift our robot off the ground.
 2016 Drive Team:
2016 Drive Team:
Austin M – Coach
Casey S – Driver
Andrew F- Aux Driver
Jordan S – Human Player
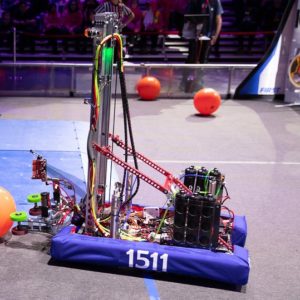
2015: THUNDERSAUREX REX

Game: Recycle Rushsm
RECYCLE RUSHsm is a recycling-themed game designed for the 2015 FIRST Robotics Competition (FRC). It is played by two Alliances of three
Teams each. Alliances compete simultaneously to score points by stacking Totes on Scoring Platforms, capping those stacks with Recycling
Containers, and properly disposing of Litter, represented by pool noodles, in designated locations. In keeping with the recycling theme of the
game, all scoring elements used are reusable or recyclable by teams in their home locations or by FIRST at the end of the season.
 2015 Drive Team:
2015 Drive Team:
Amal E – Coach
Chris S – Driver
Elliot D – Aux Driver
Manuel S- Human Player
Nick B – Strategy Lead
2014: THUNDER TUSX

Game: Aerial Assist
 2014 Drive Team:
2014 Drive Team:
Nick B – Coach
Chris S – Driver
Elliot D – Aux Driver
Amal E – Human Player
2013: PHS THUNDERPRISE
Game: Ultimate Ascent
PHS Thunderprise was designed to shoot frisbees into the high goals using a 90 degree circular shooter. It had a corner alignment that allowed it to climb to the top of the pyramid, located in the center of the field for extra points.
 2013 Drive Team:
2013 Drive Team:
Ciana R – Coach
Jake K – Driver
Gabe R – Aux Driver
Alex R – Human Player
2012: THUNDER STORM

Game: Rebound Rumble
Our robot was designed to shoot basketballs in all 3 level hoops using a turret. It was also able to pick up off the floor using a herding mechanism we called, wings. Our 6-wheel drivetrain allowed us to drive up the slippery bridges and balance with up to two other robots! A cool feature about our robot was the LED lights on the side, which would signal how many balls the robot had at the time. This year was also the first year we built twin robots to practice our driving and code on in between competitions!
 2012 Drive Team:
2012 Drive Team:
Josh G – Coach
Jason K – Driver
Gabe R – Aux Driver
Jake K – Human Player
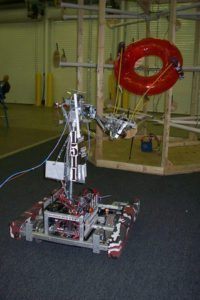
2011: THUNDEROUS PRIME

Game: Logo Motion
Logo Motion requires robots to hang inflatable tubes of different shapes (triangle, circle, square) on 3 different level pegs located on each alliance station’s wall. In the final 10 seconds of the match, robots can deploy a mini robot that runs up a 10-foot high pole for bonus points. Our robot was designed to hang tubes on all level pegs, including the highest level that would provide more points. The 330 degree rotational arm can pick tubes off the floor. We also created a mini-bot that can climb the pole in 1 second! Another cool feature was a light signal in the middle of the robot that would indicate what tube needed to be picked up next and if the robot was in possession of a tube.
 2011 Drive Team:
2011 Drive Team:
Calvin D – Coach
Jason K – Driver
Ciana R – Aux Driver
Mike H – Human Player
2010: THUNDERFOOT

Game: Breakaway
Breakaway is a 4 goal version of a soccer game with 12 balls, 6 robots and a tower to hang from in the end! Thunderfoot was designed to be able to have variable range kicking in order to kick from the far zone to the near zone and anywhere in-between. The kicker consists of two window motors, an electromagnet and surgical tubing, as well as a foot that fully extends across the front of the robot between the wheels. It also has a strong drivetrain of 4 direct drive wheels, two traction and two omni wheels. While the omni wheels increase maneuverability, the traction wheels help Thunderfoot climb the bump and push other robots if needed for defense. Thunderfoot was also originally designed to be able to hang from the sidebars of the tower off of the bump. A CIM motor drives a steel cable up a telescoping tube to raise a hook, and once the hook is secured, the steel cable is reeled in to lift the robot. Another window motor angles the telescope from one side to the other in order to provide flexibility and grab on to the bar from either side. A full overhaul at the Boston Regional gave Thunderfoot an entirely new superstructure and lifting mechanism that worked beautifully and consistently hung in nearly every match.
 2010 Drive Team:
2010 Drive Team:
Shauna R – Coach
Theo M – Driver
Becca H – Aux Driver
Calvin D – Human Player
2009: THUNDER PLUCKER

Game: Lunacy
Lunacy is a game played on “Regolith“, a slippery material made even more slippery by custom wheels that simulate the 1/6 gravity and resulting 1/6 traction of the moons surface to celebrate the 40th anniversary of the moon landing.
To combat the slippery surface, the programming team has created a “traction control” program. if the robot detects a wheel is slipping, a light will flash at the driver station, and the robot will correct the wheel via motor speed changes. In addition to traction, there is also “acceleration control” so instead of the wheels spinning out of control when starting to move, it will gradually ramp up the speed to avoid traction loss. The robot can pick up and and throw the cells via “chicken pluckers” or plastic tubes that catch the gaps in the plastic rings that make up the orbit balls. The robot can store up to 16 balls for later use.
Like many of the previous games, Lunacy starts with a 15 second “autonomous period” where the robot only obeys pre-programmed instructions. ThunderPlucker has 4 modes:
SpazBot A.K.A. “Oh Crap, Override!” drive randomly, create chaos and disrupt other auto modes
Offensive Defensive: Drive to intercept other robot’s movements
Empty Cell: ThunderPlucker drives over the the place where a empty cell is located, picks it up, and moves it back to the driver’s location.
Lonely Trailer: if a allied robot does not show up, ThunderPlucker will move the trailer to a safe location away from robots and payload specialists.
 2009 Drive Team:
2009 Drive Team:
Josh G – Coach
Brenton W – Auxiliary Pilot
Shauna R – Payload Specialist
Theo M – Pilot
2008: MACH 1511

Game: FIRST Overdrive
Mach 1511 was a robot fully designed to reach high heights to pick up and hurdle track balls at quick, efficient speeds without delay. With it’s name Mach meaning speed, alliances have been able to depend on us to assist with bonus points by placing on the overpass and easily hurdling. The Teleoperated period of Mach 1511 has continuously altered through intense test phases depending on the randomized position of the alliance colored trackball. It has also introduced us to a new player in the drivers station called the RoboCoach. The RoboCoach’s objective was to help guide the robot during the completely autonomous period to for example go straight, and then turn left. Mach 1511’s pneumatic system that allows us to control the arm and wrist of the robot, has given us a new experimental phase to work with. During the Hybrid period which is controlled by our drivers, depending on the pre-match meeting, we would be instructed to devise a strategy with our two team alliances. Sometimes Mach 1511 would have to defend and impede traffic, hurdle only, herd, run laps, and other strategies. Mach can reach to heights of approximately 8-9 feet at most and for competitions was a whopping 120 lbs! no more, no less!
 2008 Drive Team:
2008 Drive Team:
Theo M – Auxiliary Driver
Shauna R – Robocoach
Graeme B – Driver
Josh G – Coach
2007: A-RACK-NAPHOBIA
Game: Rack & Roll
A-rack-naphobia was designed to be a fast and maneuverable robot that can score tubes on all three rungs, and fairly easily remove tubes from all three rungs. The drivetrain is a six wheel drivetrain, with center traction wheels from IFI and four surrounding omni-wheels.
Using the banebots transmissions and two small CIM motors per side, the robot was fast but had a lot of torque as well.
The robot was student designed entirely in CAD before it was built, with many of the parts being manufactured at Harris. The robot was originally designed with a turret to maneuver the arm. The arm has an upper joint and a wrist to manipulate the tubes. The Gripper was made out of driveway markers and pool noodles to make it as light as possible. The robot is 5′ tall and weighs just under 110lbs.
 2007 Drive Team:
2007 Drive Team:
Josh G – Coach
Melanie S – Human Player
Martin O – Auxiliary Driver
Graeme B – Driver
2006: ROFLBOT

Game: Aim High
ROFLbot was designed to collect foam balls from the human player or its starting configuration and shoot the balls into a goal that was 8 feet in the air.
The robot was designed to be fast and maneuverable and have the ability to climb a 30 degree inclined diamond plate ramp. The drivetrain used four small CIM motors with the kit transmissions, four omni wheels and two custom designed center traction wheels made from ABS plastic.
The shooter was a dual wheel shooter, using two large CIM motors to drive wheelchair wheels locked on spinning axels. The spin speed was calibrated using optical sensors on the axels. When a ball landed in the hopper from a human player, it would be eventually fed through a tight conveyor belt composed of aluminum and round tubing. At the end of the belt there is a banner (light) sensor which stops the conveyor whenever a ball reaches the end. This gives time for the shooter wheels to rev up when the operator hits the “fire” button. The hopper was designed by our mechanical team but created and sewed by our “team moms” who worked on the last minute addition.
ROFL’s autonomous modes improved throughout the year. At the first regional, it defended scoring robots in autonomous by forcefully pushing them away from their target. By our second regional, we had created a program which would score poof balls through dead reckoning. The first time we used this, it was a major shock to the opposing alliance!
 2006 Drive Team:
2006 Drive Team:
Graeme B- Driver
Ashley C – Coach
Kieth K – Human Player
Lorien L – Auxiliary Driver
2005: RHINOBOT

Game: Triple Play
Rhinobot was designed to be able to lift 8-12lb tetrahedron shaped objects made from PVC well over 12 feet in the air. In a giant game of tick tack toe, this robot had to be fast and maneuverable and be able to lift the tetrahedrons to stack on top of each other.
Rhinobot was able to do that and so much more! Its simple lifting nose was a welded structure designed to not let the tetras catch or fall down the back of the arm, yet it was able to quickly pick and place the tetras onto the goals. The majority of the upper structure was built from 80/20 aluminum and the lifting mechanism was a giant steel leadscrew that was able to raise the arm fully weighted in under 3 seconds. This was driven off a powerful vandoor motor with a custom designed gearbox. The drivetrain was a six wheel drive, with the center traction wheels dropped 1/8″, and the four corners as omni wheels. Driven off two gearboxes, this allowed for a very small turning radius and high maneuverability on the flat field.
The robot served the team very well that year and they were able to be very competitive as rookies, doing well at the Finger Lakes regional, taking highest rookie seed (5th place) and selecting their own alliance at the Cleveland Regional, and ultimately winning the Toronto Regional alongside team 1114.
By championships Rhinobot was pretty beat up, and unfortunately didnt make it to finals, but the team had an amazing time, and all of it was topped off by winning the Rookie All Star. They proved the strength of the Rookie teams that year, both in accomplishments and in simple robot design.
 2005 Drive Team:
2005 Drive Team:
Mir K – Human Player
Tommy C – Coach
Mike H – Auxiliary Driver
Graeme B – Drive