Saturday, January 21. 2017

Our strategy team has been locked in heated debate about what we should prioritize for scoring points. Right now, they seem to be in agreement that scoring fuel (those green wiffle balls) and delivering gears are equally important in regards to points. Our drive team believes that scoring points by climbing the rope should be prioritized last since it will take a lot of time and effort during a match, but it will still be worth it to integrate our climbing mechanism into the robot.
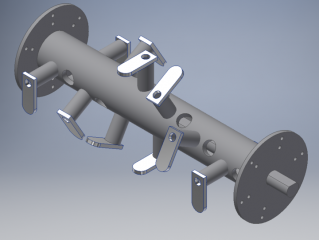
We have also come to a major decision on our shooter. There was a debate as to whether we should use a conveyor system or a series of small buckets to carry the fuel from the intake to the shooter. We eventually decided on using the bucket shooter system because even if one of the buckets broke, the rest of the shooter will still work. Whereas with the conveyor system, if one tread broke then the whole shooter would be unusable, and it would also require more sensors. If one or more of those sensors broke, then it would require a lot more electrical and programming work to fix it.
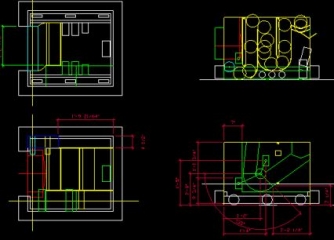
Right now there is lots of work going on in the shop as prototypes are being tested and reworked before the final CAD drawings are made. Each mechanism on the robot, such as the intake, shooter, and climber, have a sub-team of students and one or mentor assigned to them. The mentors supervise the students in the shop to ensure their safety, and provide them with guidance and support in their work and designs. But ultimately, it’s up to the students to design, build, and assemble the robot.

For more updates, be sure to check out our vlog channel.
33 days until Stop Build Day!