Week 1 and 2 Update
Hello everyone! These first two weeks have flown by for us! Here’s a look at what we have been up to:
Drive Base
- We decided on a 27.25″ x 27.25″ drive base, the top is 3.75″ off the floor, and the bottom is 0.5″ from the floor.
- We will have swerve drive.
- The location of the battery tray is still being finalized, there could be interference with the other mechanisms where it is in CAD, so we are reevaluating the location so there’s no interference.
- Assembled and painted the frame and added swerve modules.

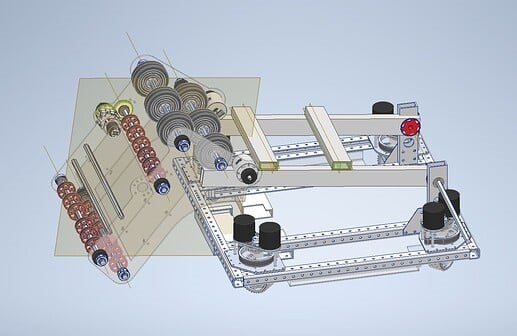
Game Piece
- Our intake/shooter design is inspired by the Unqualified Quokkas 2024 (Ri3D) robot reveal video. We are making changes based on what works best for our team, but the overall idea of it was inspired by them.
- The game piece is stored between two sets of wheels.
- We put the Stage, Amp, and Source in CAD to see how we could score from different positions.
- Debated about having a wrist or an extension so we could score in the Trap and Amp better, but so far have decided against it. We are trying to keep our design simple and a wrist or extension would make it much more complicated.
- The robot is at the correct height to pick up from the Source. We can pick up directly from the Source, however it is difficult.
- Decided that the intake would use a NEO 550 and the shooter would use 2 NEO’s. We need to finalize what motor we need for the arm.
- We finished the prototype of the intake/shooter and it was successful!
- Need to reevaluate the design of the arm- there isn’t much wiggle room from the edge of the sprocket to the edge of the drive base.
- There is 0.25″ between the edge of the sprocket and the outside of the drive base, which doesn’t give us space to put a sponsor panel on. We are currently modifying the design to use pulleys instead of sprockets to save space.
- The current arm length is around 27″ and we have a steeper angle of the intake than the reference design so we can do the Amp and (hopefully) the Trap.
- When we do ground pickup, the intake mechanism hits the ground. We might add something to the edges so it doesn’t snag on the carpet, or have it slightly above the ground.
- There have been debates about using pneumatics for the arm, but we need to do more research before we make a decision about it.

Hang
- Our design was inspired by a mix of our 2022 hang design and the PRi3D of the North 2024 hang design.
- The hook moves within the arm instead of being on top, and we kept the slot open all the way to the top of the arm so we can change out the hook when necessary.
- We started by having an inner and outer channel with the hook attached to the inner channel, but when we started adding bearing blocks we learned that there was not enough space, so we decided to connect the bearing blocks directly to the hook.
- Need to make the ratchet and pawl design more compact than our 2022 design.
- The height of each arm is 36.5″
- Need 2 NEO motors for our hang design (one for each side).
- To try and avoid the issues we had with the ratchet and pawl in the past, we decided to try a new revised design. In the past we used a servo to actuate the pawl, with a spring coupler between them to allow for minor variance. This was problematic because it was hard to install and lacked consistency. If the servo burned out, then there were problems with replacing it because the old device’s motion isn’t easy to replicate without “recalibrating” for the new one, which is time consuming and error prone.
- The new design (see image below) drives the pawl with a low power electric solenoid. It’s spring loaded in the “up” position when no electrical current is present. When it is time to climb, the solenoid will be energized, pulling the solenoid arm downward against the spring, and lifting the pawl off the ratchet wheel. We will also add a leaf switch sensor to tell the pawl when the lift is done. This is a positive signal indicating that it is safe to proceed winding the ratchet wheel in the clockwise direction.
Robot Controls/Programming
- The controls will look like a speaker to go with the theme of the game and will be smaller than our 2023 design.
- We purchased a separate laptop to be used ONLY for controls.
- Completed the laptop holder and the controls box in CAD.
- In the process of completing competition batteries and swerve code.
- Programmed the prototype shooter to test different shooting speeds and out-taking the notes.
Overall, we have been able to accomplish a lot over the past two weeks! I can’t wait to see how next week goes!
Morgan, Student Events Coordinator
